Timezone
34
FWeb & Mobile Projects

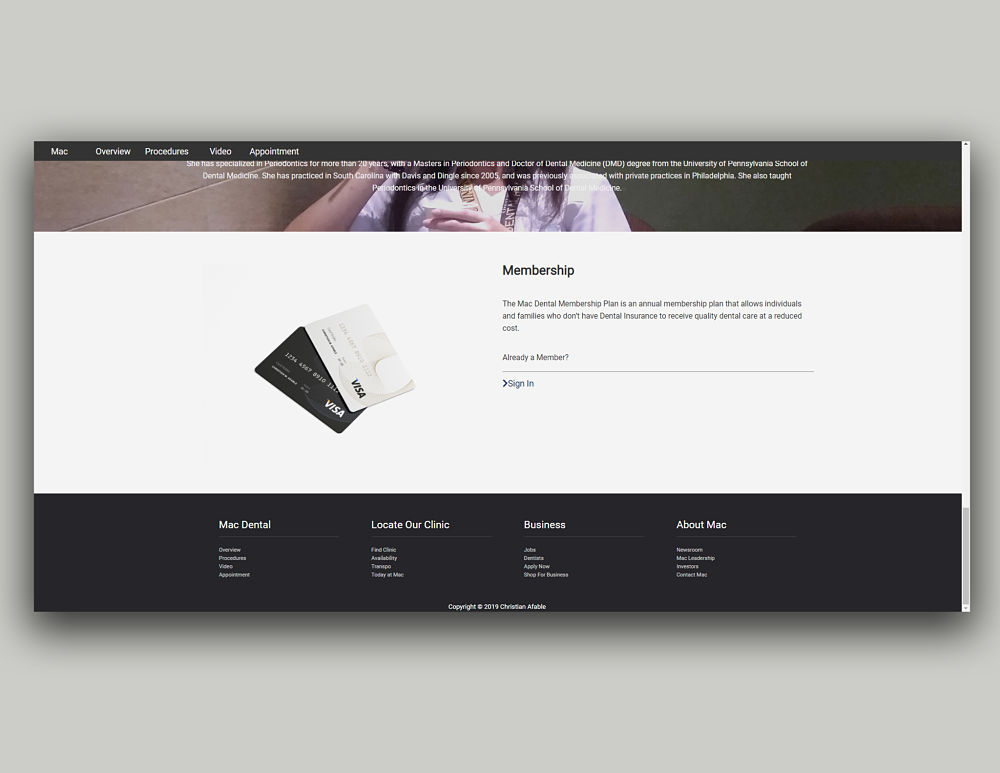
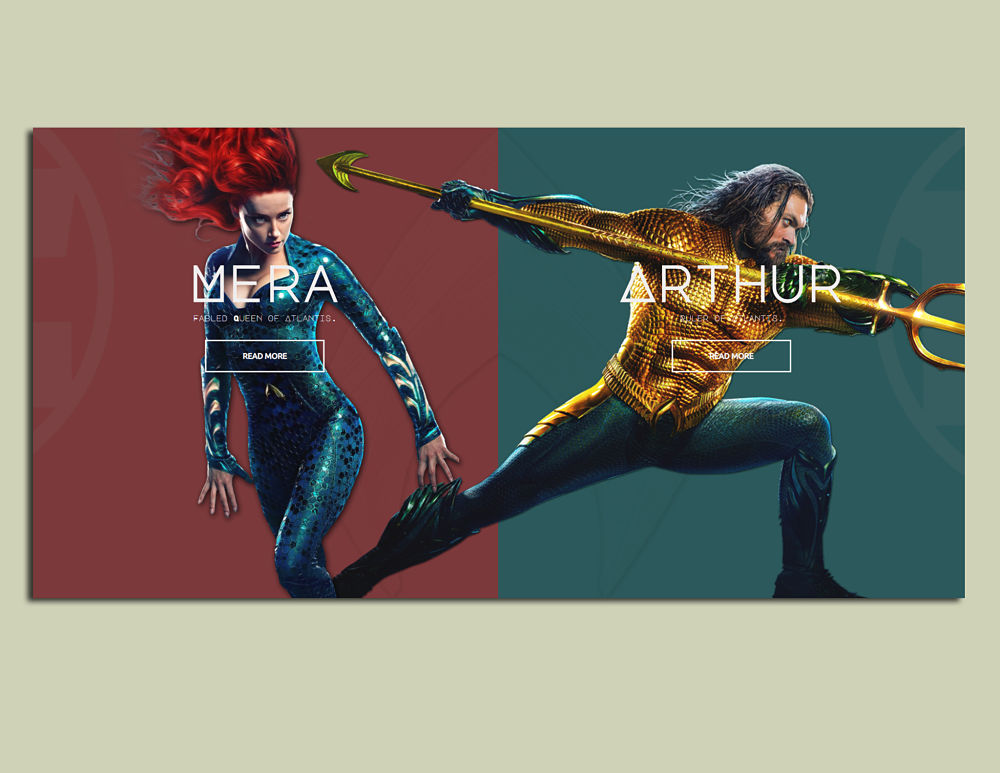

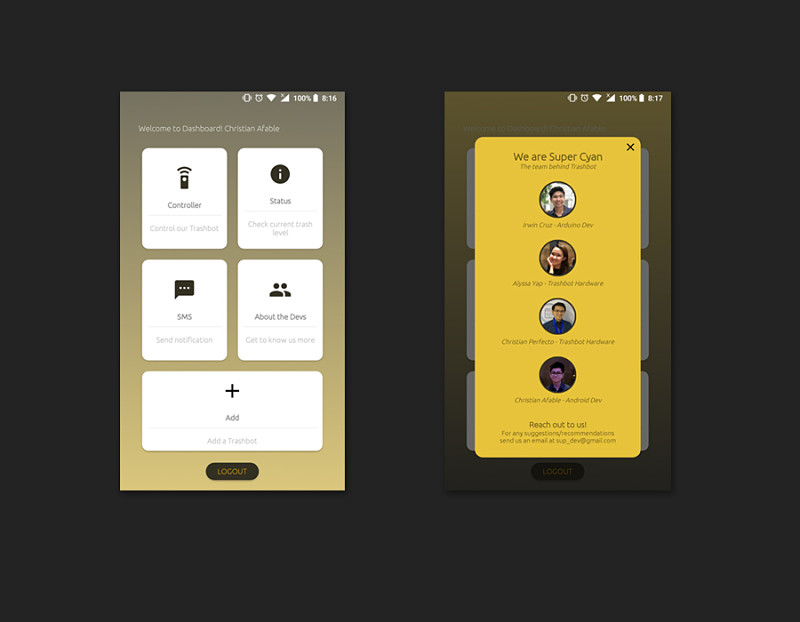
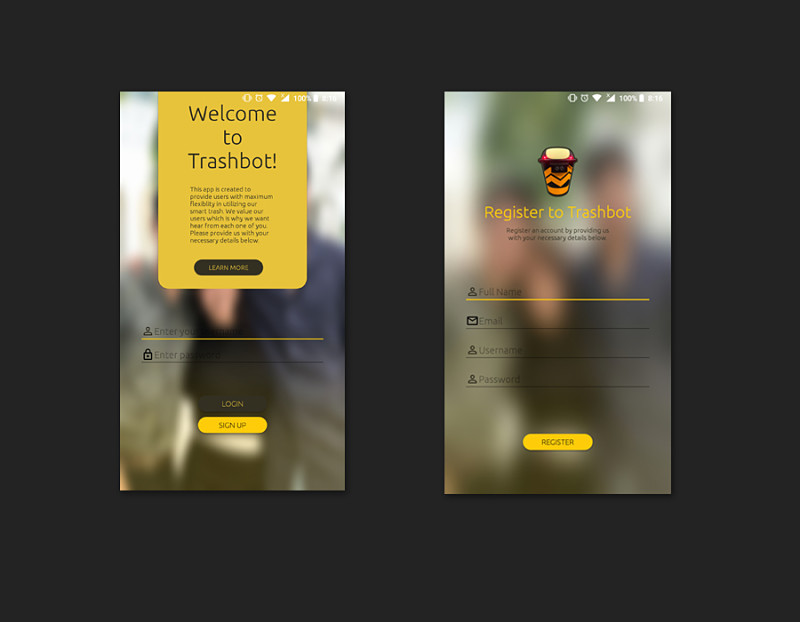
*Each project was developed using Android IDE, HTML5, CSS3, jQuery & Bootstrap.
DISSERTATION
Title: Monitoring and Detecting Traffic Congestion using Lidar Technology
Presented at Adamson University, 28th of March, 2018
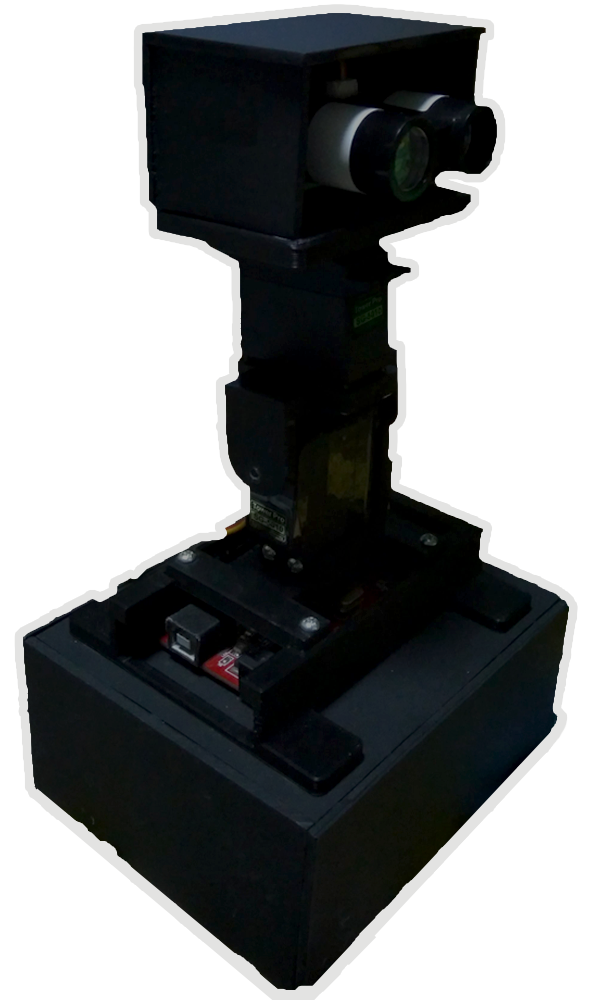
Our developed module consists of (from top to bottom) a Lidar v3 Lite sensor capable of detecting objects within 40 meters of its range, two servo mechanisms responsible for the module's rotation, and a gizDuino X ATmega 1281 microprocessor which handles most of the module's data processing tasks.
The proposed project aims to provide an alternative to traffic congestion present among intersections by providing a fully automated system powered by a module responsible for detecting current traffic flow and conditions
How it works?

The photo shows a diorama which is a representation of an intersection having 5 vehicles on two separate lanes. The module will sweep from lane A to B and will detect whether there is an object present from each point (red boxes on lane B & yellow boxes on lane A). Each white cardboard boxes represents a vehicle residing on an individual point.
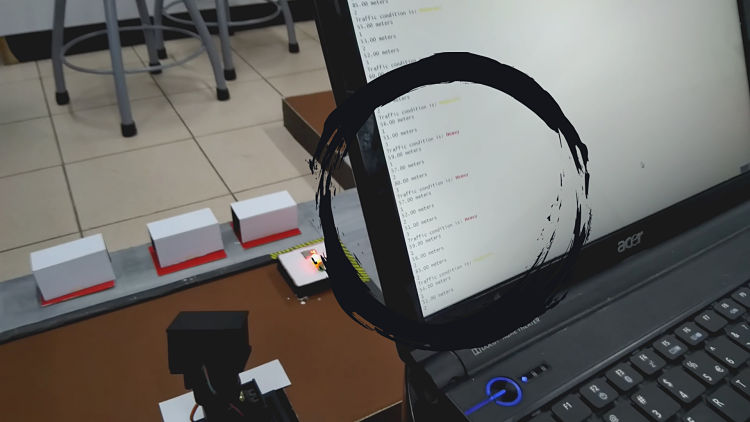
Once the module has finished its sweep, it will process the data collected via its microprocessor and will determine the current traffic condition (Light, Moderate, Heavy). The decision will affect the timer for each traffic lights present on each lane. This project aims to optimize traffic flow through automation.
The team behind the project

Design

I focus on implementing well-structured responsive designs that meets client requirements.
Things I design:
UX/UI, Mobile, Apps
Design Tools:
Adobe Photoshop
Code

I like to build and conceptualize designs and bring it to life through front-end development.
Languages I use:
HTML5, CSS3, Android IDE, PHP
Dev Tools:
Android Studio, Bootstrap, jQuery
Work Experience
TÜV Rheinland Philippines Inc.
Quality and Assurance Engineer Intern (April - Jun 2018)
As an intern, I was tasked to conduct laboratory tests on electronic products in order to determine if each product adhere to the safety standards of the company as part of their quality control.
I was also trained to handle company database to manage both outgoing and incoming products from clients. Their database was developed in order to easily track and schedule deliveries of every electronic products. It also plays a huge role in maintaining proper product storage. Every product is tagged with a unique id which is also recorded in the company database for retrieval purposes.





LANGUAGES USED

HTML5
Due to its numerous benefits such as increased browser compatibility, usability and user experience, HTML5 is one of the go-to tools I consider when it comes to front-end development.

CSS3
I like to use CSS for maintaining proper website layout and presentation. It allows me to create a responsive website that adapts to different types of devices.
jQuery
jQuery allows me to implement JavaScript much easier on any website I create. In addition, it also offers animation features for an improved front-end development experience.

Bootstrap
Bootstrap enables me to easily perform certain CSS and HTML based ready design templates which can be utilized for an overall improved website aesthetics.

Android IDE
I like to use Android Studio when it comes to developing android applications because of its user-friendly environment for developing and coding. It also offers editor tools for creating UI and emulators.

The Dev
Christian Afable
BS Computer Engineering, Adamson University
(+046)4587306
(+63)9770467302
afablechristian.ca@gmail.com
christianafable@outlook.ph
Send me an e-mail!